Design Ideation
The ideation process for height adjustment was not treated as single component-selection process. Instead, it progressed through a sequence of design questions, where each stage of the subsystem was compared against the most important needs of BoxBunny: sufficient stroke, structural stiffness under punching, compact packaging, manufacturability at prototype scale, and practical usability. To make those trade-offs explicit, selection matrices were used as a decision-support tool.
In this subsystem, the role of the selection matrix was used to structure the design progression from basic adjustability concepts, to guide-and-actuator separation, to the final integrated telescopic column architecture. Each matrix narrowed the solution space and made the design trade-offs explicit.
1. High-Level Height-Adjustment Concept
| Concept | User adjustability | Structural rigidity under punch loads | Complexity | Packaging | Final decision |
|---|---|---|---|---|---|
| Fixed-height body | None | High | Low | High | |
| Manual telescopic mast | Moderate | Moderate | Low | Moderate | |
| Commercial lift column | High | Uncertain | Low | High | |
| Guided lift column + screw jack | High | High | Moderate | High |
This first matrix was used to decide the overall adjustment philosophy. A fixed-height body was rejected immediately because it could not accommodate different users. A manually adjustable mast would reduce electrical complexity, but it would compromise ease of use and would not give clean, repeatable setup positioning. Commercial lift columns were attractive because of their integrated packaging, but their side-load capability under boxing disturbances was too uncertain.
The guided lift column plus screw jack direction was selected because it was the only concept that directly addressed both the user's need for adjustability and the robot's need for structural stability under punch loading. This was the first point at which the subsystem moved beyond simple height change and became a true structural design problem.
2. Guide Strategy
| Concept | Lateral stiffness | Part count | Tolerance sensitivity | Serviceability | Final decision |
|---|---|---|---|---|---|
| Dual rear linear guides + carriage | High | Poor | Poor | Moderate | |
| Telescopic guided column | High | High | High | High | |
| Actuator-only guidance | Poor | High | High | Poor |
This matrix was used to decide how the subsystem should react punching-induced side loads. The early dual-linear-guide concept was mechanically sound and played an important role in clarifying the load-path logic. It offered good stiffness, but it relied on many precision-mounted components and introduced alignment sensitivity and potential failure points. An actuator-only guidance concept was rejected because it would side-load the screw and compromise reliability.
The telescopic guided column was selected because it preserved the same fundamental structural logic as the rear-linear-guide concept, but implemented it with fewer parts, a cleaner load path, and lower tolerance sensitivity. This was one of the most important design refinements in the subsystem.
3. Actuator Strategy
| Concept | Visual | Axial load capacity | Self-holding / fail-safe behaviour | Integration with guide structure | Complexity | Final decision |
|---|---|---|---|---|---|---|
| Gas spring / gas lift | 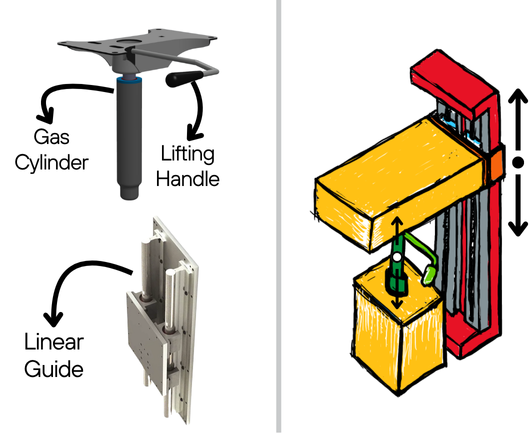 |
Moderate | Poor | Poor | Low | |
| Powered linear actuator column | 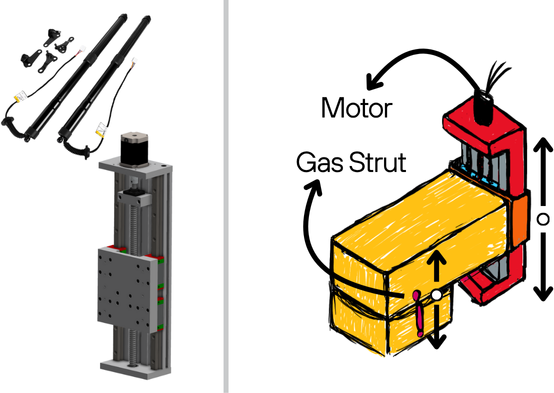 |
Moderate to high | Moderate | Moderate | Low | |
| Screw jack with travelling nut | 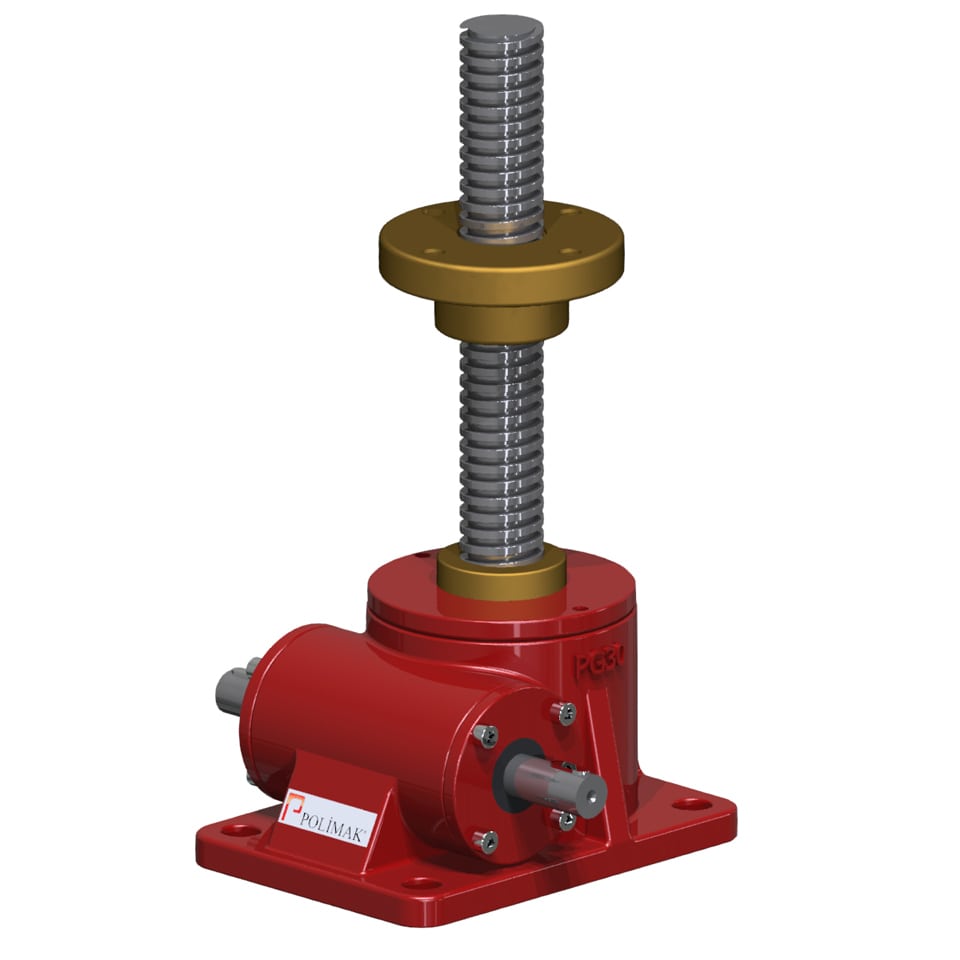 |
High | High | High | Moderate |
This matrix focused on the actual lifting device. Gas-spring-based concepts were rejected because they behave like spring-damper systems and are structurally too compliant for a robot that receives impact. Commercial powered lift columns remained attractive, but again suffered from uncertainty in side-load behaviour and less explicit control over load-path design.
The travelling-nut screw jack was selected because it provides a strong axial support mechanism, has inherent self-holding behaviour, and integrates naturally with a guide structure that resists lateral loads separately. This matched the desired fail-safe and load-separation philosophy of the subsystem.
The final design is a custom telescopic column housing an integrated HK2T travelling-nut screw jack. The inner aluminium extrusion is guided by Delrin wear pads that run against the outer steel column, while the screw jack is driven by a 24V DC gear motor. This decoupled design provides a compact, robust, and safe height adjustment mechanism that meets the unique demands of BoxBunny's punching interactions.